I have watched multiple videos, read multiple pdfs. Since books (on computer graphics) do not seem to go deep on this topic for some reason.(Maybe this stuff would be found in more depth in mathematics textbooks instead but I have no idea which one).
But unable to grasp the concept.

This is a 3d axis.
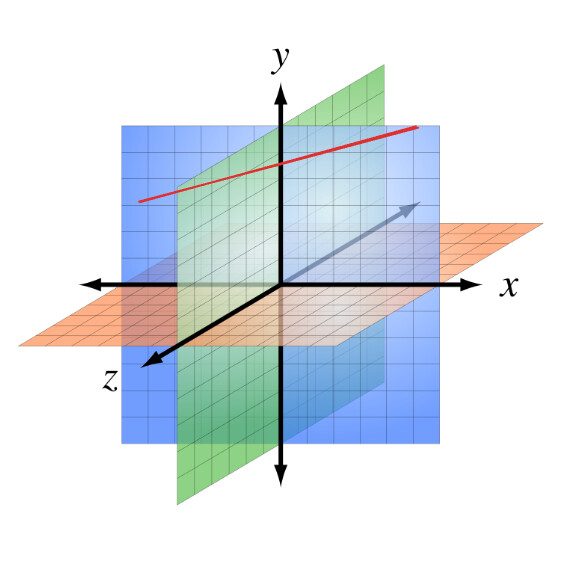
The red line is a line floating on three dimensional space.
First I need to translate it to origin.
The three dimensional translation matrix in homogenous coordinates is:

Confusion#1 Some books use right hand coordinate system whereas some books use left hand coordinates system and it seems to affect the placement of dx,dy and dz. Because I have seen some textbooks/tutors, placing the displacement vectors on the 4th row instead of 4th column. What could be the reason behind this? How does right handed vs left handed coordinates make this difference?

As shown in the figure now the line passes via origin.
The next step is to rotate about x-axis by angle theta-x counter clock wise.(Mini-confusion#2 How did we decide to do that?)
I cannot visualize how will this rotation takes place exactly.
I guess something like this shall happen.

But what angle will it rotate through? I am not clear about it.
Angle with x-axis? Or y-axis or z-axis? How do we decide it?
Then in another step we rotate about y-axis

Same confusion as earlier persists here in addition to “direction of rotation” because the author seems to do clockwise rotation in this case. I suspect this is determined by the right hand rule. But unsure about how. I read about right hand rule and it tells nothing about angle of rotation(as far as I could comprehend).
Finally we rotate about z-axis by the provided angle.
Then we reverse these pre-processing type of transformations that we did.
Chatgpt seems to hallucinate on these complex stuffs. So I am seeking feedback from real person. I know asking all these for free is not doable for a full time professional. But even if you could provide me a slightest assistance, I can build upon that.
